| ↰ 5.1 | Material | 5.4 → |
| ← 5.2 | HM 2 |
Zu den Themen dieses Abschnitts könnte die interaktive Seite zu Vektorfeldern, Kurven(integralen) und Potentialen hilfreich sein.
Es sei
Eine Abbildung
Die Kurve, die hier parametrisiert wird, ist
Für jedes stetige Vektorfeld
das Kurvenintegral von
Sind
In diesem Sinn hängt der Wert des Kurvenintegrals nicht von der Parametrisierung ab.
Man kann daher
setzen, dabei heißt
vektorielles Bogenelement.
Es handelt sich hier nur um eine Schreibweise: um das
Kurvenintegral zu berechnen, muss man eine Parametrisierung
Oft kann man nicht die ganze Menge
Man schreibt in diesem Fall
(und muss sich gegebenenfalls den Durchlaufungssinn merken!).
Ist
Deswegen nennt man
Gegeben sei das Vektorfeld
Die Kurve
Mit
ergibt sich
Es seien
Weil wir Anfangs- und Endpunkt festlegen, ist auf der Kurve ein Durchlaufungssinn ausgezeichnet.
Um diesen umzukehren, lassen wir den Parameter rückwärts
laufen
:
Die Funktion
parametrisiert die rückwärts durchlaufene Kurve
Wegen
Wenn man den Durchlaufungssinn umkehrt, ändert sich also das Vorzeichen des Kurvenintegrals.
Eine Kurve
Um anzudeuten, dass über eine geschlossene Kurve integriert wird, schreibt man manchmal auch
und nennt dies ein Umlaufintegral.
Geschlossene Kurven können wir eventuell doppelpunktfrei
parametrisieren (also mit einer Parametrisierung
In diesem Fall kann man das Umlaufintegral immer noch ohne Zerlegung der Kurve berechnen.
Vorsicht muss man aber beim Umlaufsinn walten lassen!
Es sei
Außerdem sei
Ist
Für jedes Potential
Mit anderen Worten: Kurvenintegrale bezüglich Gradientenfeldern sind wegunabhängig.
Nach der Kettenregel 4.8.3
hat die Funktion
Jetzt ist es aber höchste Zeit, die interaktive Seite zu Vektorfeldern, Kurven(integralen) und Potentialen (wieder) zu besuchen.
Die Formel in 5.3.10 rechtfertigt, jede Potentialfunktion eines Gradientenfelds als Stammfunktion dieses Vektorfelds zu bezeichen.
Außerdem kann man ein Potential zum Gradientenfeld
berechnet.
So erhält man ein Potential
Dass diese Berechnung von
Als Kurven Haken
, die jeweils stückweise parallel
zu einer Koordinatenachse verlaufen.
In diesem Fall nennt man die in
Explizite Beispiele solcher Hakenintegrale findet man in 5.3.16 — dort wird das Kurvenintegral manchmal aber auch vom Weg abhängen.
Das Vektorfeld
erfüllt
Nach 5.2.4
ist
Eine Potentialfunktion ist
Für jede stückweise regulär parametrisierte Kurve
Das Vektorfeld
haben wir bereits in 5.3.5
betrachtet. Ein Potential zu
Mit 5.3.10
erhalten wir für jede Kurve
Besitzt ein Vektorfeld
Umgekehrt gilt:
Gibt es im Definitionsgebiet des Vektorfelds eine geschlossene,
stückweise regulär parametrisierte Kurve
Wir betrachten das Vektorfeld
Der Definitionsbereich ist nicht einfach zusammenhängend, aber wir können Potentiale auf geeigneten Teilmengen angeben:
Auf
auf der Menge
Für jede geschlossene, stückweise regulär parametrisierte Kurve, die eine der Koordinatenachsen meidet, gilt also
Wir können dies sogar noch erweitern:
Wegen
besitzt das Vektorfeld
Solche einfach zusammenhängenden Gebiete können recht kurios aussehen:
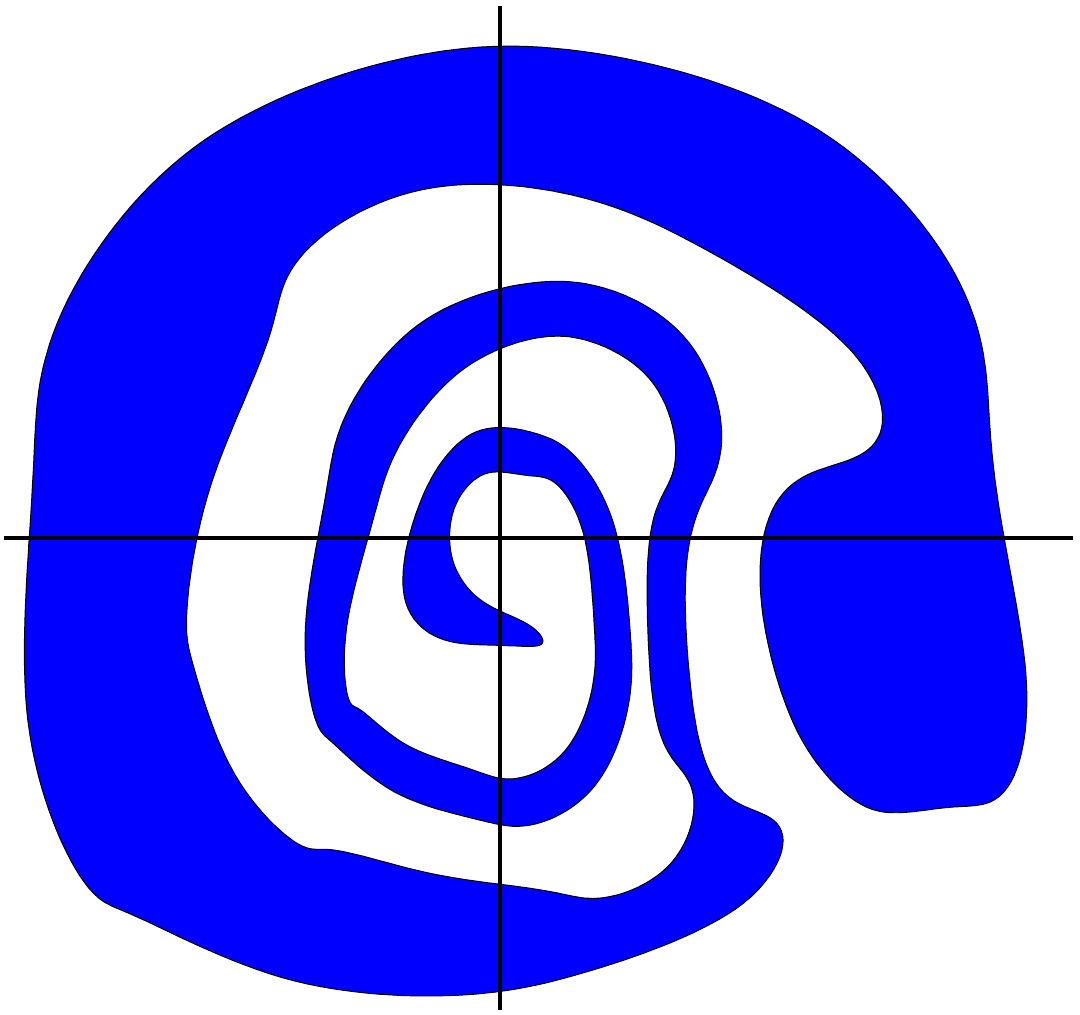
Wir parametrisieren den Einheitskreis
Es gilt
und damit
Dieses Umlaufintegral wird also nicht Null, und auf keinem Gebiet,
das den Einheitskreis enthält, gibt es ein Potential für
Insbesondere nicht auf
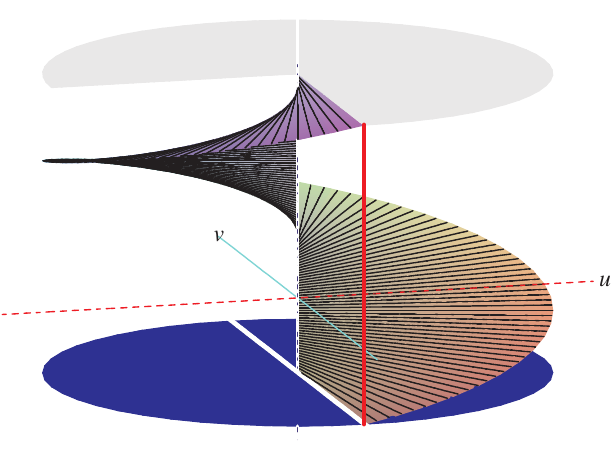
Wir wollen den Verlauf der Potentialfunktion
verdeutlichen.
Zur jetzt folgenden Diskussion gibt es auch
ein 3D-Modell, das sie
auch online
bewegen
und erforschen können.
Statt des vollen (unbeschränkten) Definitionsbereichs zeichnen wir in den folgenden Bildern nur den Teil, der im Innern eines Kreises um den Ursprung liegt.
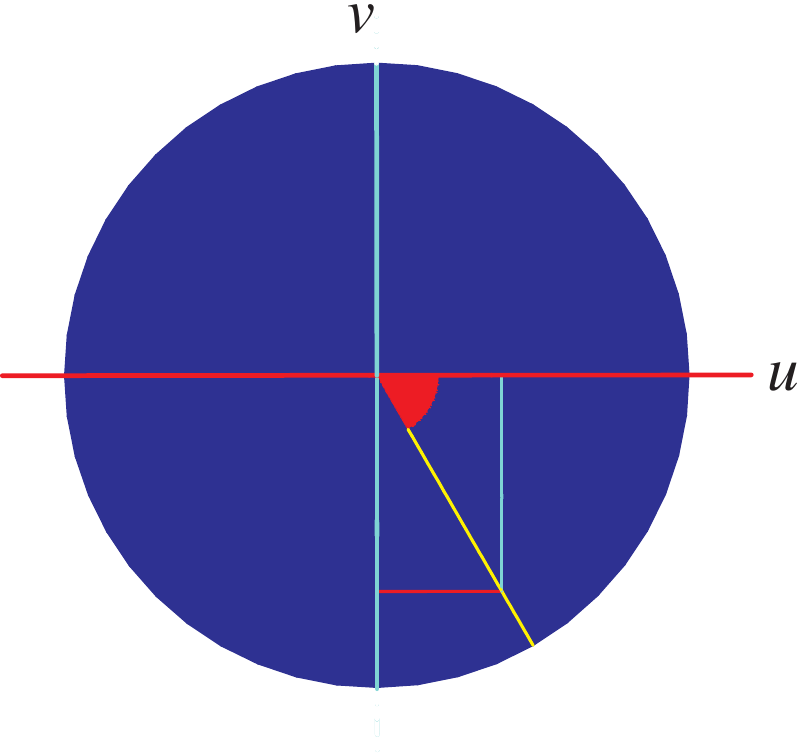
Es gilt
Wir erhalten
Das geht gut, weil wir (in 2.3.4)
die Umkehrfunktion
In diesem Bereich läuft dann
Wenn wir den Winkel
Dabei wiederholen sich die Werte für
Die durch
Die Schnitte dieser Geraden mit dem Definitionsbereich
sind Niveaulinien von
Beim Übergang über die Definitionslücke
(springt
der Wert des Potetntials zwischen
Wir verschieben die Andeutung des Definitionsbereichs um
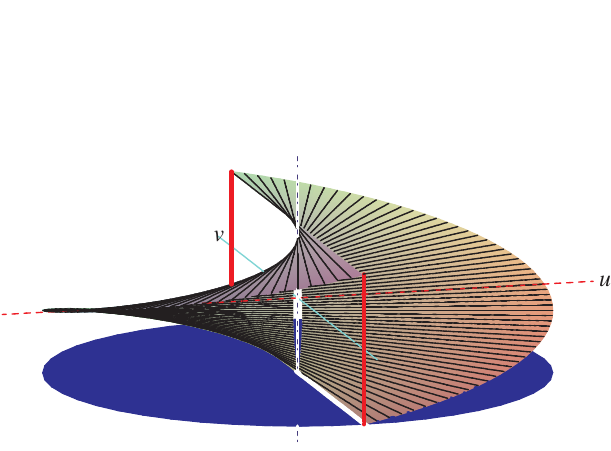
Wenn wir auf der linken Hälfte unser Potential um
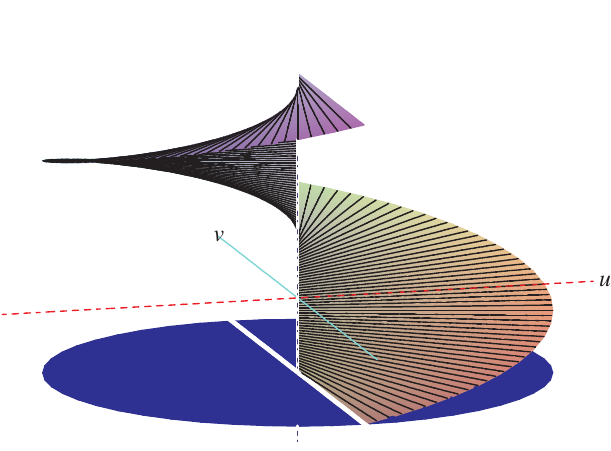
Explizit setzen wir
Damit erhalten wir eine Potentialfunktion
Diese Funktion
Wir verschieben die Andeutung des Definitionsbereichs wieder um
(Durch Klick auf das Bild starten Sie eine Video-Animation.)
Außer dem eben betrachteten Vektorfeld
betrachten wir das Vektorfeld
Diese beiden Felder wollen wir entlang der folgenden Kurven integrieren:
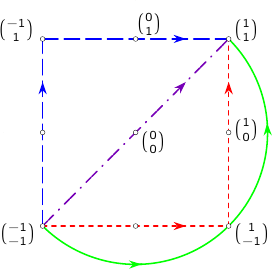
Hier stehen gleich schon Parametrisierungen für diese Kurven:
Dabei können wir das Feld
Hier wären uneigentliche Integrale zu betrachten. Da diese hier
nicht konvergieren, lassen wir die Finger davon.
Für den roten Weg rechts um die Ecke
von
Solche Integrale haben wir in 3.4.9 berechnet:
Mit
Für den blauen Weg links um die Ecke
von
Die beiden bis jetzt berechneten Integrale nennt man (wegen der Form
der Kurven
Offenbar hängt der Wert des Kurvenintegrals davon ab, auf welcher
Seite
man um die Definitionslücke herum geht.
Da das Vektorfeld
Die Integrationswege liegen dann beide innerhalb eines einfach zusammenhängenden Teilgebiets des Definitionsbereichs.
In der Tat ergibt sich beispielsweise bei Integration längs
rechts herum
):
Das Vektorfeld
Deswegen können Kurvenintegrale dieses Feldes auch im einfach zusammenhängenden Definitionsgebiet vom gewählten Weg abhängen.
In der Tat gilt
Wir wollen Kurvenintegrale benutzen, um Potentialfunktionen zu bestimmen. Dabei setzen wir die Existenz eines Potentials voraus (diese wird durch abstrakte Kriterien wie 5.1.5 gesichert).
Wir wollen das Potential berechnen, indem wir über geeignete Kurven integrieren. Dabei benutzen wir notfalls Kurven, die nur stückweise regulär sind.
Es sei
Wir legen einen Punkt
Für jeden Punkt
Dann wird durch
Da das Integral
Es sei
Dies existiert, weil wir
Dann gilt für jeden Punkt
Also unterscheidet sich die Funktion
Wir betrachten das Feld
Die Jacobi-Matrix
Da das Feld
Wir wählen als Startpunkt
Die von den Wegen
Damit erhalten wir eine stückweise regulär parametrisierte Kurve
Der Weg
Das gesuchte Potential erhalten wir jetzt z.B. als Hakenintegral:
Die beiden Teilintegrale berechnen wir als
sowie
Wir erhalten also
Wenn wir den direkten Weg
und erhalten dasselbe Potential (wie erwartet).
| ↰ 5.1 | Material | 5.4 → |
| ← 5.2 | HM 2 |